

၁။ အုပ်ချုပ်ရေးမှူး၏ လျှပ်စစ်စွမ်းဆောင်ရည်သတ်မှတ်ချက်များ
(၁) ဗို့အားအပိုင်းအခြား: DC5V-28V။
(၂) အဆင့်သတ်မှတ်ထားသော လျှပ်စီးကြောင်း- MAX2A၊ မော်တာကို လျှပ်စီးကြောင်းပိုများအောင် ထိန်းချုပ်ရန်အတွက် မော်တာဓာတ်အားလိုင်းကို ပါဝါထောက်ပံ့မှုနှင့် တိုက်ရိုက်ချိတ်ဆက်ထားပြီး ဂါဗာနာမှတစ်ဆင့် မဟုတ်ပါ။
(၃) PWM အထွက်ကြိမ်နှုန်း: 0~100KHz။
(၄) အန်နာလော့ဗို့အားအထွက်: ၀-၅ဗို့။
(၅) အလုပ်လုပ်သည့် အပူချိန်: -၁၀℃ -၇၀ ℃ သိုလှောင်သည့် အပူချိန်: -၃၀℃ -၁၂၅ ℃။
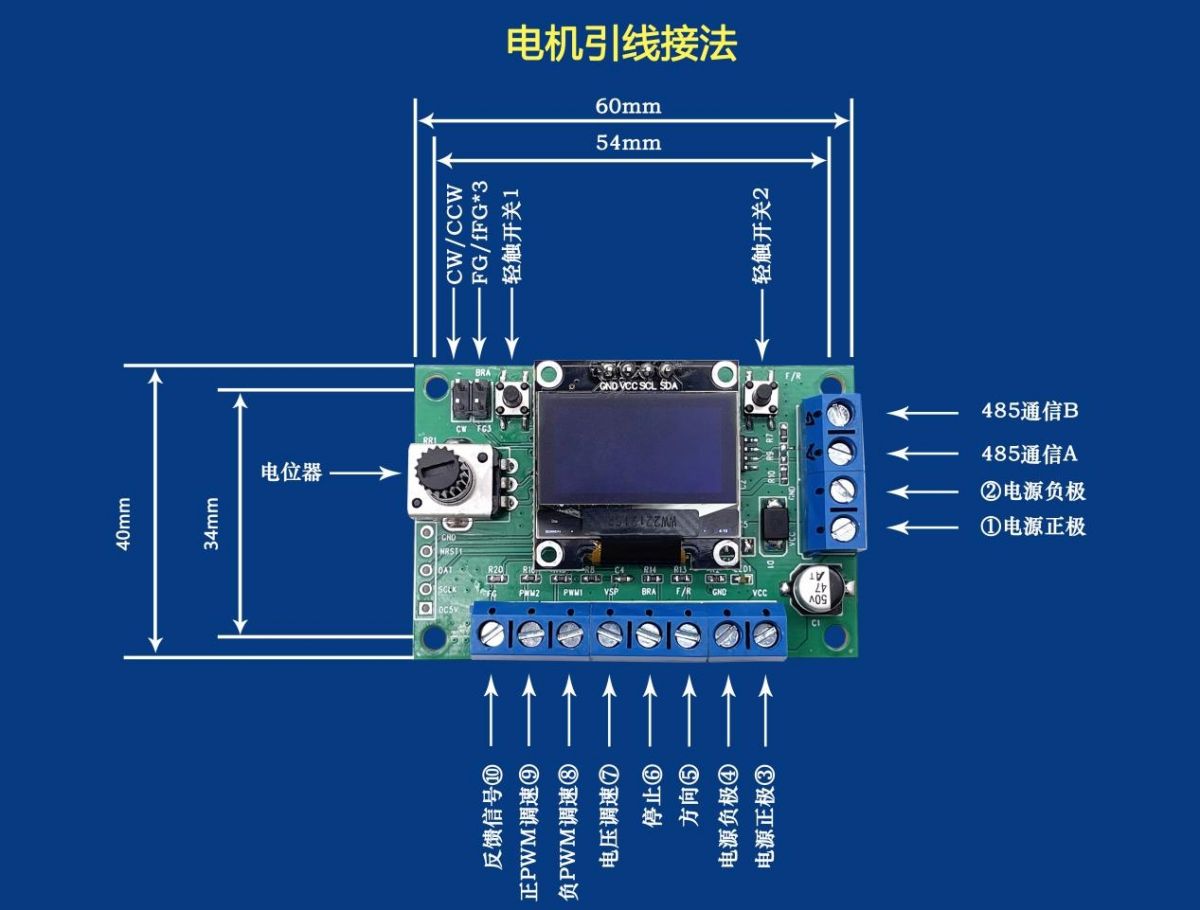
(၆) ဒရိုက်ဘာဘုတ်အရွယ်အစား- အလျား ၆၀ မီလီမီတာ X အနံ ၄၀ မီလီမီတာ

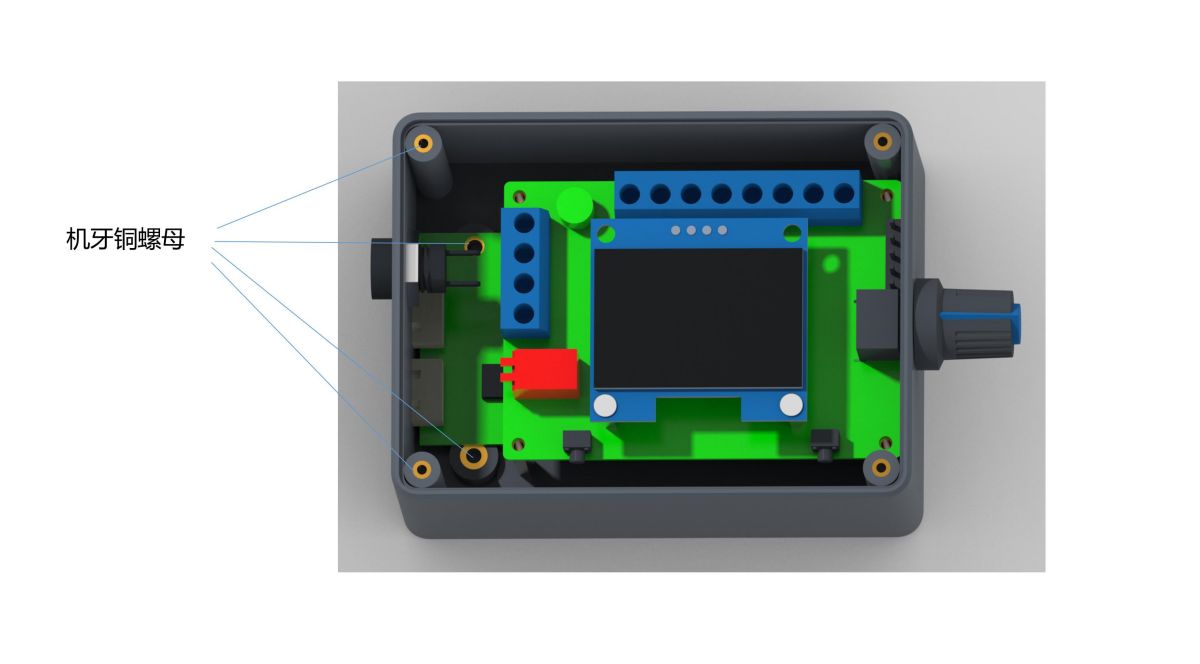
၂။ အုပ်ချုပ်ရေးမှူးဝါယာကြိုးနှင့် အတွင်းပိုင်းလုပ်ဆောင်ချက်ဖော်ပြချက်
① အုပ်ချုပ်ရေးမှူး၊ မော်တာပါဝါထောက်ပံ့မှု အပြုသဘောဆောင်သော input။
② အုပ်ချုပ်ရေးမှူး၊ မော်တာပါဝါထည့်သွင်းမှု အနုတ်လက္ခဏာ။
③ မော်တာ၏ ပါဝါထောက်ပံ့မှု၏ အပေါင်းအထွက်။
④ မော်တာ၏ ပါဝါထောက်ပံ့မှု၏ အနုတ်လက္ခဏာ အထွက်။
⑤ အပြုသဘောနှင့် အနုတ်လက္ခဏာလည်ပတ်မှုထိန်းချုပ်မှု၏ မြင့်မားသောနှင့် အနိမ့်အဆင့်အထွက်၊ မြင့်မားသောအဆင့် 5V၊ အနိမ့်အဆင့် 0V၊ touch switch 2 (F/R) ဖြင့် ထိန်းချုပ်သည်၊ ပုံသေမှာ မြင့်မားသောအဆင့်ဖြစ်သည်။
⑥ ဘရိတ်ထိန်းချုပ်မှု၏ မြင့်မားသောနှင့် အနိမ့်ဆုံးအဆင့် အထွက်၊ မြင့်မားသောအဆင့် 5V၊ အနိမ့်ဆုံးအဆင့် 0V၊ touch switch 1 (BRA) ဖြင့် ထိန်းချုပ်သည်၊ ပုံသေမြင့်မားသောအဆင့်တွင် ပါဝါကို ထားပါ။
7 အန်နာလော့ဗို့အားအထွက် (0~5V)၊ ဤအင်တာဖေ့စ်သည် အန်နာလော့ဗို့အားအမြန်နှုန်းထိန်းညှိမော်တာကိုလက်ခံရန်သင့်လျော်သည်။
⑧PWM1 ပြောင်းပြန်အထွက်၊ ဤ interface သည် PWM အမြန်နှုန်းထိန်းညှိမှုကို လက်ခံသော မော်တာအတွက် သင့်လျော်ပြီး အမြန်နှုန်းသည် duty cycle နှင့် ပြောင်းပြန်အချိုးကျသည်။
⑨PWM2 ရှေ့သို့ထွက်ရှိမှု၊ ဤ interface သည် PWM အမြန်နှုန်းထိန်းညှိမှုကိုလက်ခံသော မော်တာများအတွက် သင့်လျော်ပြီး အမြန်နှုန်းသည် duty cycle နှင့် အချိုးကျသည်။
⑦-⑨ အင်တာဖေ့စ် သုံးခု၏ အထွက် အချက်ပြ ပြောင်းလဲမှုများကို ပိုတင်စီအိုမီတာဖြင့် ချိန်ညှိသည်။
⑩ မော်တာတုံ့ပြန်ချက် အချက်ပြမှု အဝင်။
မှတ်ချက်- FG/FG*3 သည် ဂျမ်ပါအဖုံးထည့်ရန်၊ မထည့်ရန် တကယ့်မော်တာတုံ့ပြန်ချိန်များအပေါ် အခြေခံသင့်ပြီး၊ ဂျမ်ပါအဖုံးမရှိခြင်းသည် FG ၏ တစ်ကြိမ်နှင့် မြှောက်သည်၊ ဂျမ်ပါအဖုံးတိုးလာခြင်းသည် FG*3 ၏ 3 နှင့် မြှောက်သည်။ CW/CCW အတွက်လည်း အတူတူပင်ဖြစ်သည်။
၃။ အချို့သော parameter ဆက်တင်များကို ထိန်းချုပ်ပါ
(၁) ကြိမ်နှုန်းသတ်မှတ်ခြင်း- ပါဝါဖွင့်ခြင်းမပြုမီ touch switch 1 ကို နှိပ်ထားပြီး ဖိထားပါ၊ ထို့နောက် governor board ကို ပါဝါဖွင့်ပါ၊ ခလုတ်ကို လွှတ်လိုက်သောအခါ မျက်နှာပြင်တွင် "FEQ:20K" ပေါ်လာသည်အထိ စောင့်ပါ၊ ထို့နောက် လျှော့ချရန် switch 1 ကို နှိပ်ပါ၊ ထပ်ထည့်ရန် switch 2 ကို နှိပ်ပါ။ သတ်မှတ်ထားသော ကြိမ်နှုန်းအတိုင်း ကြိမ်နှုန်းကို ချိန်ညှိနိုင်သည်၊ စက်ရုံမှ မူရင်းအတိုင်း 20KHz ဖြစ်သည်။
(၂) သတ်မှတ်ထားသော ဝင်ရိုးအရေအတွက်- ပါဝါမဖွင့်မီ မီးထိခလုတ် ၁ နှင့် မီးထိခလုတ် ၂ ကို တစ်ပြိုင်နက်တည်း ဖိထားပါ၊ ထို့နောက် governor board ကို ပါဝါဖွင့်ပါ၊ မျက်နှာပြင်တွင် "" ဝင်ရိုးအရေအတွက်: 1 polarity" ပြသသည်အထိ စောင့်ပါ၊ ထို့နောက် မီးထိခလုတ် ၁ ကို လျှော့ချပြီး မီးထိခလုတ် ၂ ကို ထည့်သွင်းပါ။ ချိန်ညှိနိုင်သော ဝင်ရိုးနံပါတ်သည် မော်တာအတွက် ဒီဇိုင်းထုတ်ထားသော ဝင်ရိုးနံပါတ်ဖြစ်ပြီး စက်ရုံမှ မူရင်းအတိုင်း ၁ ဝင်ရိုးဖြစ်သည်။
(၃) တုံ့ပြန်ချက်ဆက်တင်- ပုံ ၁ တွင် FG/FG*3 pin ကို တုံ့ပြန်ချက်မြှောက်ကိန်းအဖြစ် သတ်မှတ်ထားပြီး မော်တာ၏ တုံ့ပြန်ချက်မြှောက်ကိန်းသည် FG ၏ တစ်ကြိမ်နှင့်မြှောက်ခြင်း သို့မဟုတ် FG ၏ သုံးကြိမ်ဖြစ်ခြင်းအပေါ် မူတည်၍ သတ်မှတ်ပြီး jumper cap ကိုထည့်ခြင်းသည် FG ၏ ၃ ဆဖြစ်ပြီး jumper cap ကိုမထည့်ခြင်းသည် FG ၏ တစ်ကြိမ်နှင့်မြှောက်ခြင်းအပေါ် မူတည်သည်။
(၄) ဦးတည်ရာဆက်တင်- ပုံ ၁ ရှိ CW/CCW pin သည် မော်တာ၏ မူလအခြေအနေတွင် ဦးတည်ရာဆက်တင်ဖြစ်သည်။ မော်တာဦးတည်ရာ ထိန်းချုပ်လိုင်းကို ဆိုင်းငံ့ထားသည့်အခါ မော်တာသည် CW သို့မဟုတ် CCW ဖြစ်သည်ဆိုသည့်အပေါ်မူတည်၍ သတ်မှတ်သည်။ skip cap ထည့်ထားသော CCW၊ skip cap မပါသော CW။
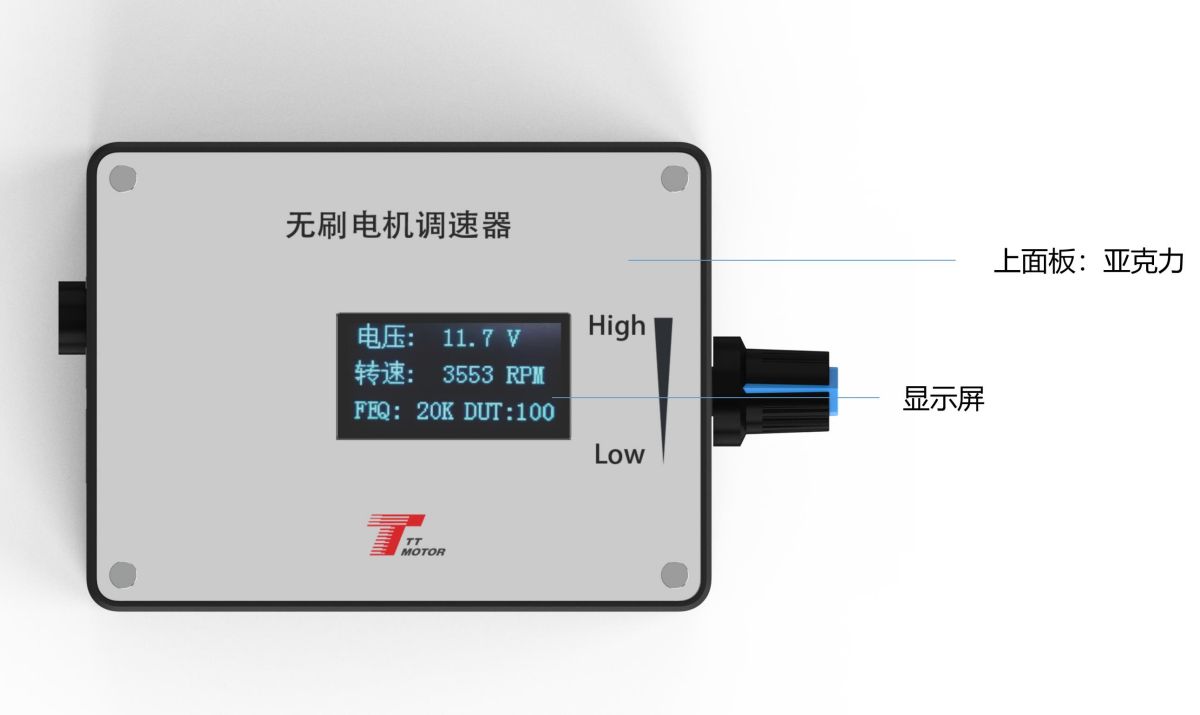
အဓိက: လက်ရှိမျက်နှာပြင်သည် အဓိကအားဖြင့် ဤလေးခု၏ အဝင်ဗို့အား၊ အမြန်နှုန်း၊ ကြိမ်နှုန်း၊ တာဝန်လည်ပတ်မှုကို ပြသသည်။ အမြန်နှုန်းကို ပုံမှန်ပြသမှု FG/FG*3၊ ဝင်ရိုးနံပါတ်သို့ သတ်မှတ်ရမည်။


၄။ ပြည်နယ်အုပ်ချုပ်ရေးမှူးများ၏ ကြိုတင်ကာကွယ်မှုများ
(၁) ဂါဗာနာ၏ အပေါင်းနှင့် အနုတ် ပါဝါထောက်ပံ့မှုကို ညွှန်ကြားချက်များနှင့်အညီ ချိတ်ဆက်ရမည်ဖြစ်ပြီး ပြောင်းပြန်လှန်၍မရပါ၊ မဟုတ်ပါက ဂါဗာနာသည် အလုပ်မလုပ်နိုင်တော့ဘဲ ဂါဗာနာကို လောင်ကျွမ်းစေလိမ့်မည်။
(2) အထက်ဖော်ပြပါ ထိန်းချုပ်မှု မျက်နှာပြင်နှင့် မော်တာနှင့် တွဲဆက်ရန်အတွက် governor ကို အသုံးပြုသည်။
၃၊ ⑤-⑨ ပေါက်ငါးခုသည် 5V ဗို့အားထက် ပိုမိုဝင်ရောက်၍မရပါ။

ပို့စ်တင်ချိန်: ၂၀၂၃ ခုနှစ်၊ ဇူလိုင်လ ၂၁ ရက်